Im Studiengang Informationstechnik & System-Management wurde die Steuerung eines mobilen Roboters mit einem Playstation-Controller entwickelt. Das Ziel des Projektes war, den Roboter “mBot Ranger” via Playstation-Controller und ROS, dem Robot Operating System, zu steuern.
Die Herausforderung lag unter anderem bei ROS, dem Robot Operating System, einer Middleware, welche die Kommunikation zwischen verschiedenen verteilten Programmen verwaltet. ROS wird in der Industrie und in der Forschung zum Steuern von Robotern und zur Kommunikation zwischen den Robotern verwendet. Das Robot Operating System hat den Vorteil, dass man mit ROS verschiedene Roboter steuern kann, ohne die jeweilige Programmiersprache des Roboters zu beherrschen. Ein weiterer Aspekt ist, dass das Robot Operating System von einer großen Community weiterentwickelt wird und „OpenSource“ ist. Dazu gibt es Bibliotheken zur Pfadfindung, Planung und zum Autonomen Betrieb eines mobilen Roboters, dies könnte auch ein Auto oder ein LKW sein.
Die Steuerkette wurde wie folgt aufgebaut: Der Playstation Controller sendet die erhaltenen Werte mittels Bluetooth an einen Raspberry Pi. Diese Werte werden am Raspberry Pi von einer sogenannten ROS-Node, einer Applikation des Robot Operating System, eingelesen und anschließend zu einem weiteren Knoten gesendet. Diese Knoten wurden in pyhton programmiert. An diesem Knoten werden die Werte verarbeitet und in Prozent umgerechnet. Des Weiteren sendet der Knoten die Werte auf ein sogenanntes Topic, wo sich jeder Roboter in Verbindung mit ROS die Daten holen kann.
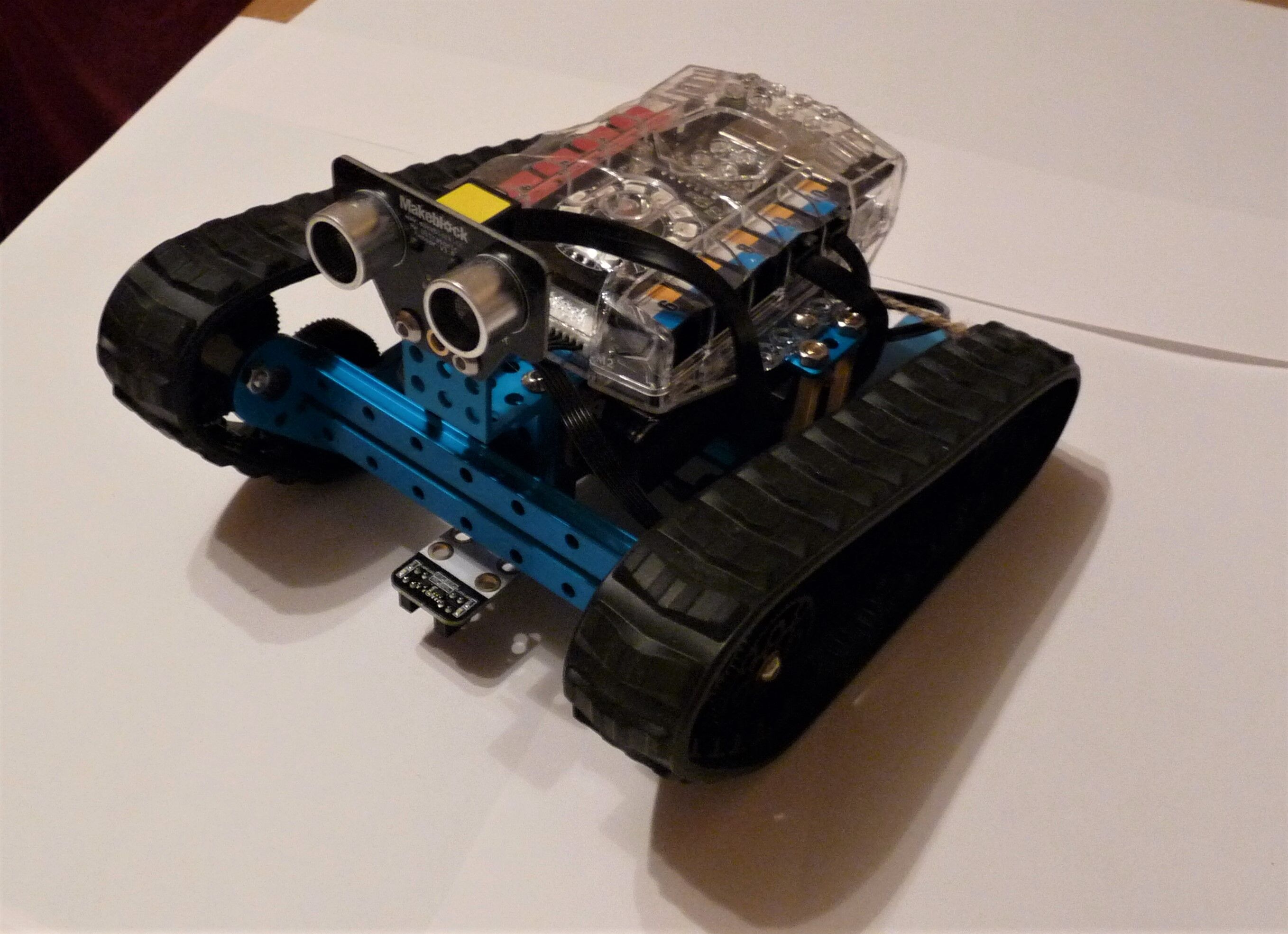
So auch der Roboter mBot-Ranger. Dieser bekommt über eine serielle ROS-Schnittstelle seine benötigten Daten und verarbeitet sie. Der Ranger besitzt einen Kettenantrieb, ähnlich zu einem Panzer. Damit hat der Roboter mehr Bewegungsfreiheit und kann sich auch am Stand drehen. Dazu hat dies auch den Vorteil, dass sich der Roboter in unwegsamen Gelände bewegen kann. Am Aluminium Gehäuse des Roboters ist ein Ultraschallsensor zur Abstandsmessung, sowie ein LiPo-Akkumulator, der Raspberry Pi und das MeAuriga Bord, ein Mikrocontroller angebaut.
Facts:
Projekt-Betreuer: DI Regina Schönherr, BSc
Typ: Bachelorprojekt
Studiengang: Bachelor Informationstechnik & System-Management