Für die konkrete Realisierung wurde das HMI/SCADA-System zenon von der Firma Copa Data und ein sechs-achs KUKA-Roboter verwendet. Die Schnittstelle wurde mit dem Laufzeitsystem ProconOS und dem Phoenix Contact Treiber von Copa Data aufgebaut.
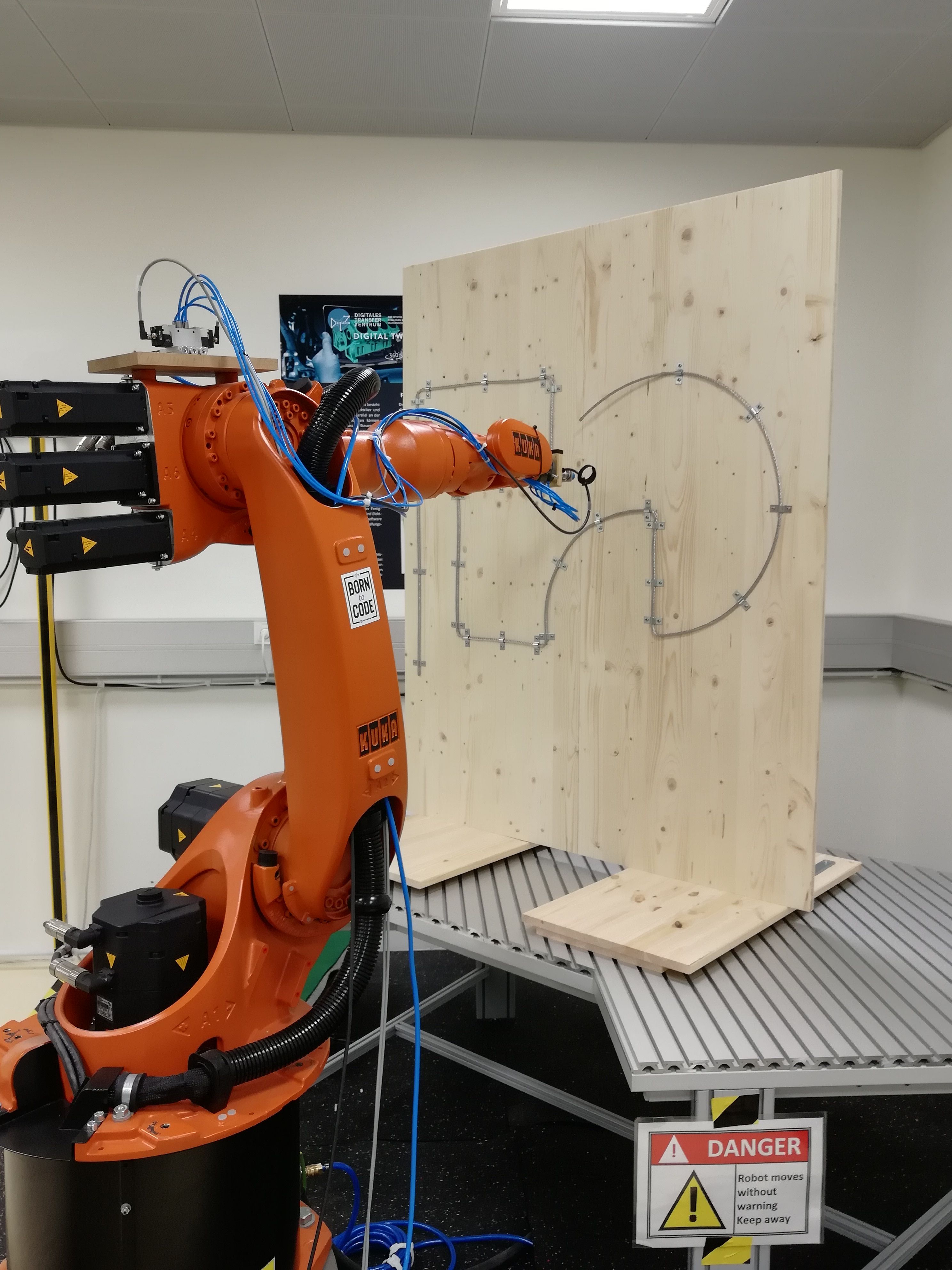
Ziel des Projektes ist die Steuerung und Überwachung des KUKA-Roboters über die Zenon-Oberfläche. Der Roboter soll sich entlang einer festgelegten Bahn, zu sehen in Abbildung 1, bewegen. Ziel bei der Bahngestaltung ist die Entwicklung eines möglichst aussagekräftigen Designs, welches verschiedenste Bewegungsarten beeinhaltet. Die Entfernung des Roboters zur Bahn wird mittels induktivem Sensor gemessen und bei zu großer Entfernung eine Meldung auf der Oberfläche dargestellt.
Facts:
Projekt-Team: Alexander Ebner, Sarah Riedmann, Reinhard Portenkirchner
Projekt-Betreuer: DI (FH) DI Simon Kranzer
Typ: Bachelorprojekt
Studiengang: Bachelor Informationstechnik & System-Management