Die Robotersteuerung wurde in den letzten Jahrzehnten revolutioniert. In der Vergangenheit wurde für jeden Roboter ein eigenes Programm geschrieben, um den Roboter zu steuern. Das war vor allem sehr zeitaufwändig, wenn man es mit mehreren Robotern zu tun hatte, weil man sich mit jeder Umsetzung auseinandersetzen musste. Mithilfe des Robot Operating Systems, kurz ROS genannt, hat man nur noch eine Umgebung, welche man erlernen muss, mit der man alle Roboter steuern kann.
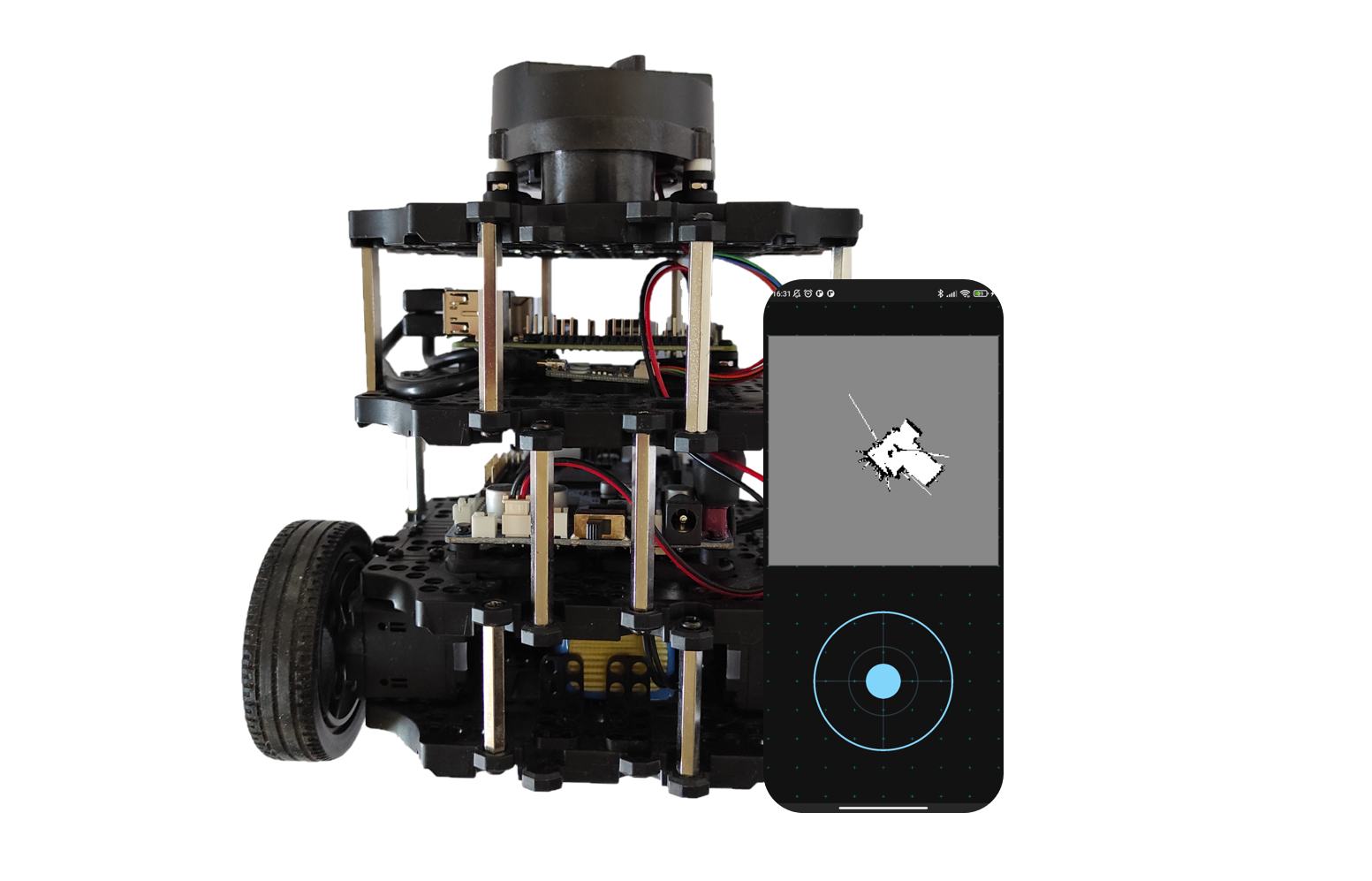
Ziel dieses Projektes war es den Roboter "TurtleBot3.0 Burger" über ein Smartphone, beim Tag der offenen Tür der FH Salzburg, zu steuern. Dazu gibt es von ROS den ROS Master, welcher sich darum kümmert, dass das Smartphone eine Verbindung mit dem Roboter aufbauen kann. Der ROS Master läuft auf einem Linux Computer. Wenn sich das Smartphone mit dem Roboter verbinden soll, müssen sich beide bei dem ROS Master anmelden und mitteilen, welche Informationen sie schicken und welche Informationen sie abfragen wollen. Wenn die Art der Information übereinstimmt, verbindet der ROS Master diese Informationen direkt miteinander, wodurch dann das Smartphone dem TurtleBot Anweisungen zum Fahren erteilen kann und der TurtleBot dem Smartphone zeigen kann, wie seine Umgebung aussieht.
Die Herausforderungen bei dem Projekt waren einerseits der Kommunikationsaufbau zwischen Smartphone und Roboter und andererseits das Einarbeiten in einen umfangreichen externen Code, welcher nicht gut dokumentiert ist. Zur Umsetzung wurde die Smartphoneapplikation ROS-Mobile verwendet, mit welcher bald die Verbindung mit dem TurtleBot aufgebaut werden konnte, wodurch diese Herausforderung rasch gemeistert werden konnte. Diese Applikation wird auch weiterhin gewartet und bietet die Möglichkeit, diese an die eigenen Bedürfnisse anzupassen. Für den Tag der offenen Tür wurde die App so abgeändert, dass sie nur gestartet werden muss. Das bedeutet, es wird der Rechner mit dem ROS Master gestartet, der TurtleBot eingesschaltetund dann das Smartphone mit dem richtigen WLAN verbunden und die App gestartet. Das Mobiltelefon verbindet sich automatisch mit dem ROS Master und dem TurtleBot und man kann die Konfiguration im Modus "Tag der offenen Tür" nicht aus Versehen verändern und somit die Konfiguration beschädigen.
Facts:
Projekt-Betreuer: DI Dominik Hofer, BSc
Typ: Bachelorprojekt
Studiengang: Bachelor Informationstechnik & System-Management